




BIGTREETECH U2C V2.1-3 CAN Output
USB-to-CAN interface board (3x CAN, USB)
All counterpart connectors (incl. pins included (excl. USB).
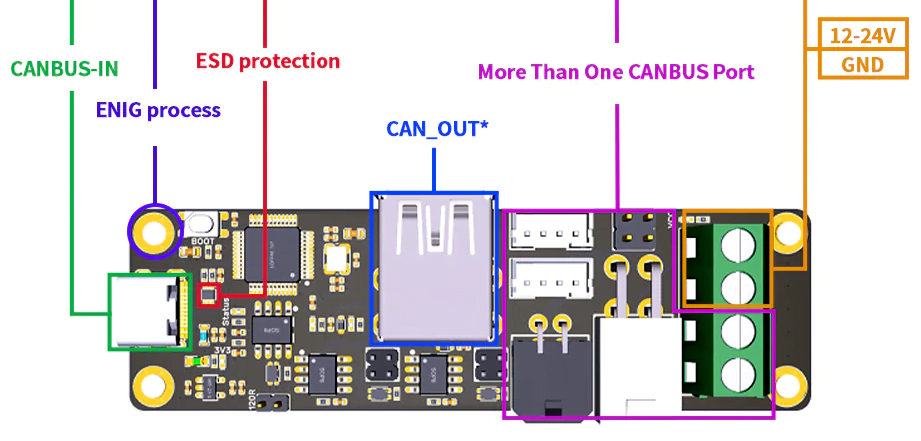
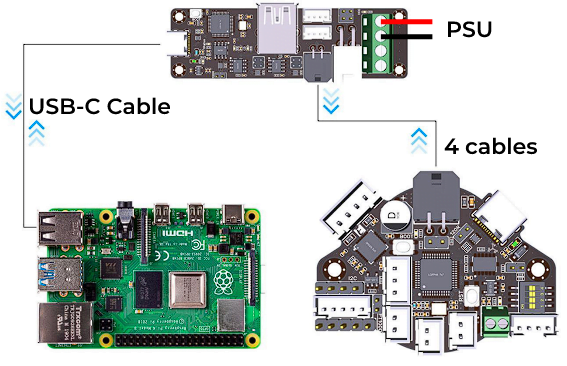
The Bigtreetech U2C boards converts CAN bus communication to USB, so you can connect your Raspberry Pi to a CAN toolhead board (e.g. the BTT EBB36 or EBB42).
The adapter comes with different types of CAN connectors to facilitate the wiring.
Product features:
- Support CAN bus connection, long data transmission, strong anti-noise ability, strong real-time performance and high reliability.
- The surface of the PCB adopts the ENIG process.
- The TYPE-C port is equipped with ESD protection to prevent static electricity from damaging the hardware.
- Support firmware update for the motherboard through SWD or hardware DFU.
- More than one CAN interface.
Firmware for V2.0/2.1 can be downloaded here (MCU Model: STM32G0B1C8)
Raspberry Pi (Klipper) configuration
Firmware Configuration Reference
SSH into your RaspberryPi
Generate the file can0 with Nano or the editor of your choice:
sudo nano /etc/network/interfaces.d/can0
Paste the following text into the generated document:
allow-hotplug can0 iface can0 can static bitrate 500000 up ifconfig $IFACE txqueuelen 1024 pre-up ip link set can0 type can bitrate 500000 pre-up ip link set can0 txqueuelen 1024
Exit and save:
CTRL+X Y Enter
Reboot the RaspberryPi:
sudo reboot
Test the connection:
ip -s link show can0
You should see a message like:
3: can0: <NOARP,UP,LOWER_UP,ECHO> mtu 16 qdisc pfifo_fast state UP mode DEFAULT group default qlen 1024
Every device on CANBus generates a canbus_uuid based on the MCU’s UID, to find each microcontroller’s device ID, make sure the hardware is powered on and wired correctly, then run:
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0
If an uninitialized CAN device is detected, the above command will report the device’s canbus_uuid:
Found canbus_uuid=0exxxxxxxxx
If Klipper is already running and connected to this device, the canbus_uuid will not be reported, which is normal.
More details in the User manual
Precautions
- 12/24V and GND should be connected correctly.
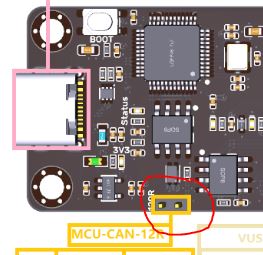
- When using CAN communication, you need to see which CAN node is used as a terminal (in the typical Voron use case both CAN nodes need to be terminated). To terminate the U2C, you must plug the jumper cap into the 120R position.
%22%20transform%3D%22translate(.5%20.5)%20scale(1.02734)%22%20fill-opacity%3D%22.5%22%3E%3Cellipse%20fill%3D%22%23fff%22%20rx%3D%221%22%20ry%3D%221%22%20transform%3D%22rotate(-96.3%2068.8%2075.3)%20scale(255%2049.97433)%22%2F%3E%3Cellipse%20fill%3D%22%233e3e45%22%20cx%3D%22202%22%20cy%3D%22111%22%20rx%3D%22126%22%20ry%3D%2276%22%2F%3E%3Cellipse%20fill%3D%22%23ffffd0%22%20rx%3D%221%22%20ry%3D%221%22%20transform%3D%22rotate(-92%20177.4%2051.7)%20scale(27.74547%20204.45383)%22%2F%3E%3Cellipse%20fill%3D%22%23747479%22%20rx%3D%221%22%20ry%3D%221%22%20transform%3D%22matrix(-45.29026%2010.09348%20-6.85723%20-30.76895%2070.8%20164.2)%22%2F%3E%3C%2Fg%3E%3C%2Fsvg%3E)




Reviews
There are no reviews yet.